The dRISK Knowledge Graph is a scenario database and risk assessment solution for AV developers, fleet operators and infrastructure planners.
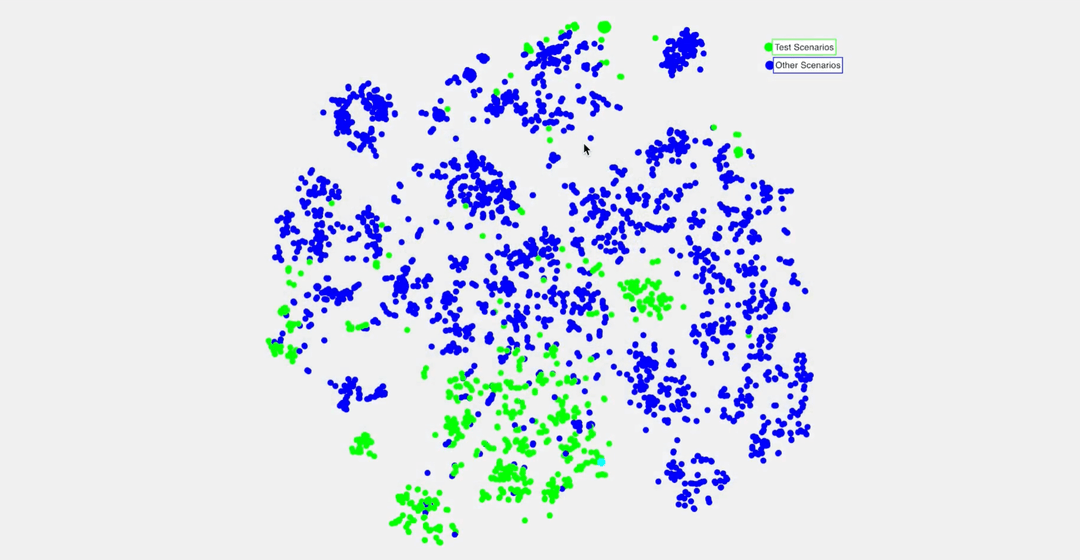
Ensure test coverage over the entire space of risk
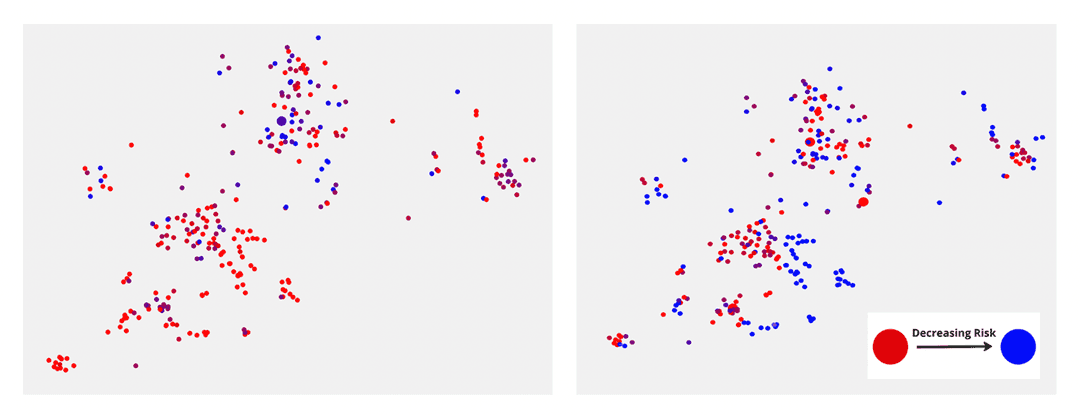
Analyze scenarios using comprehensive risk metrics
Use Cases
Explore how dRISK can help you build safer AVs
Ensure testing coverage over the space of risk
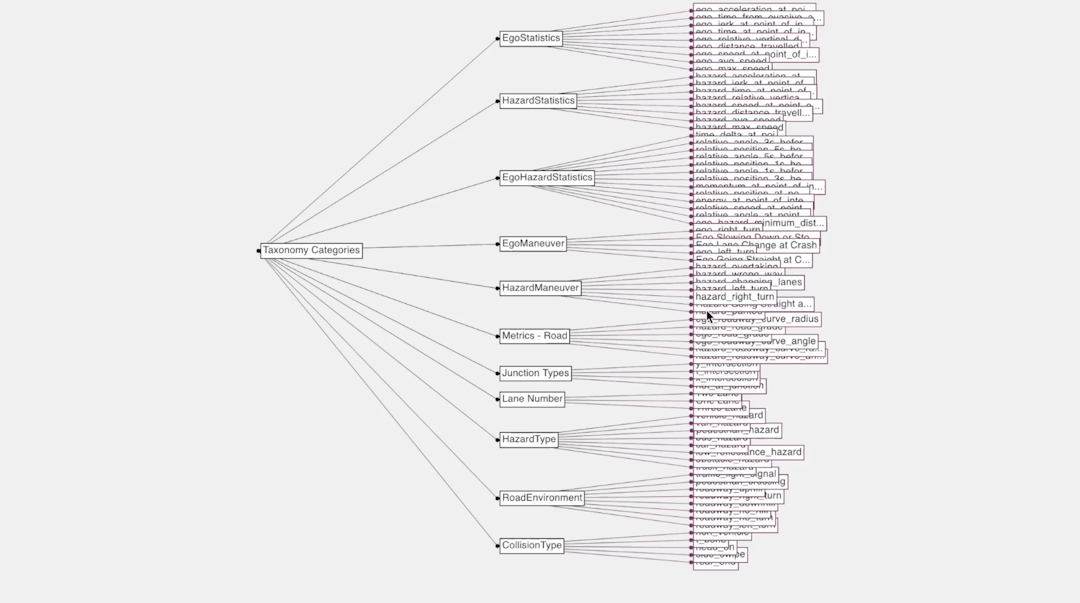
Gain immediate insight into the space of risk covered by your current tests, then plug any gaps by selecting the scenarios you need directly from dRISKs Knowledge Graph using our comprehensive taxonomy
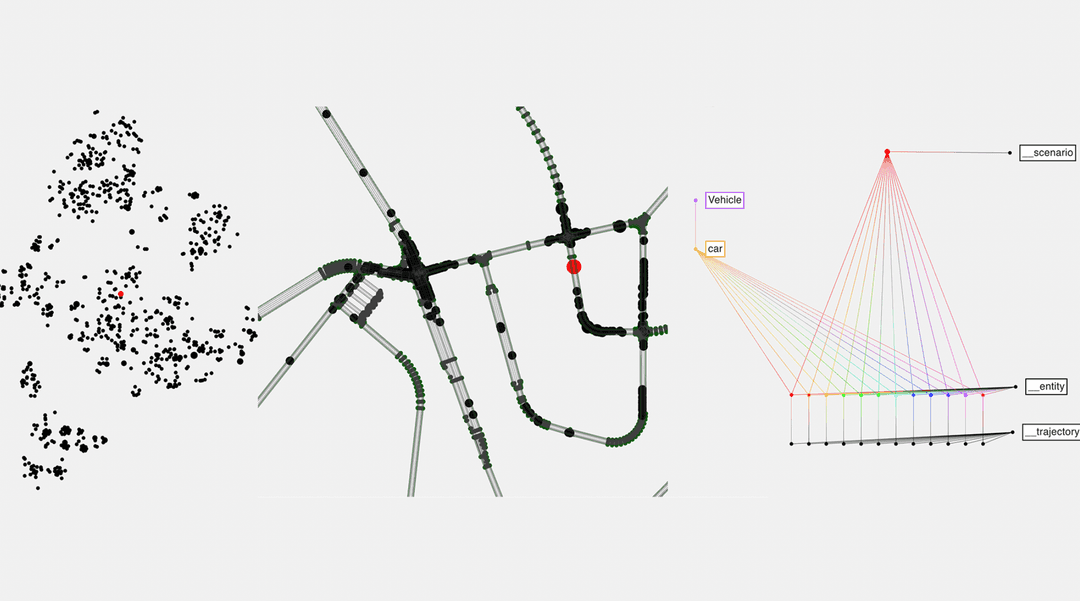
Full geospatial projection and ODD coverage and Comprehensive risk metrics
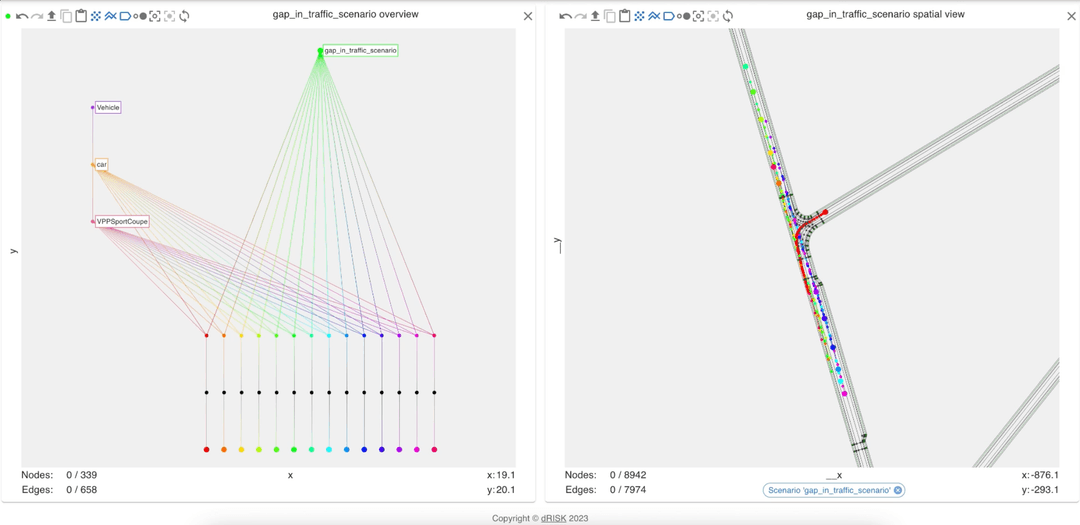
Explore real or simulated scenarios which are statistically significant for a chosen Operational Design Domain, and view scenarios projected in situ

Scenario adaptation, creation and domain randomisation
Copy and modify scenarios, create programmatically or even manually; generate even more adversarial behavior, e.g. with dRISK’s custom recombination algorithm
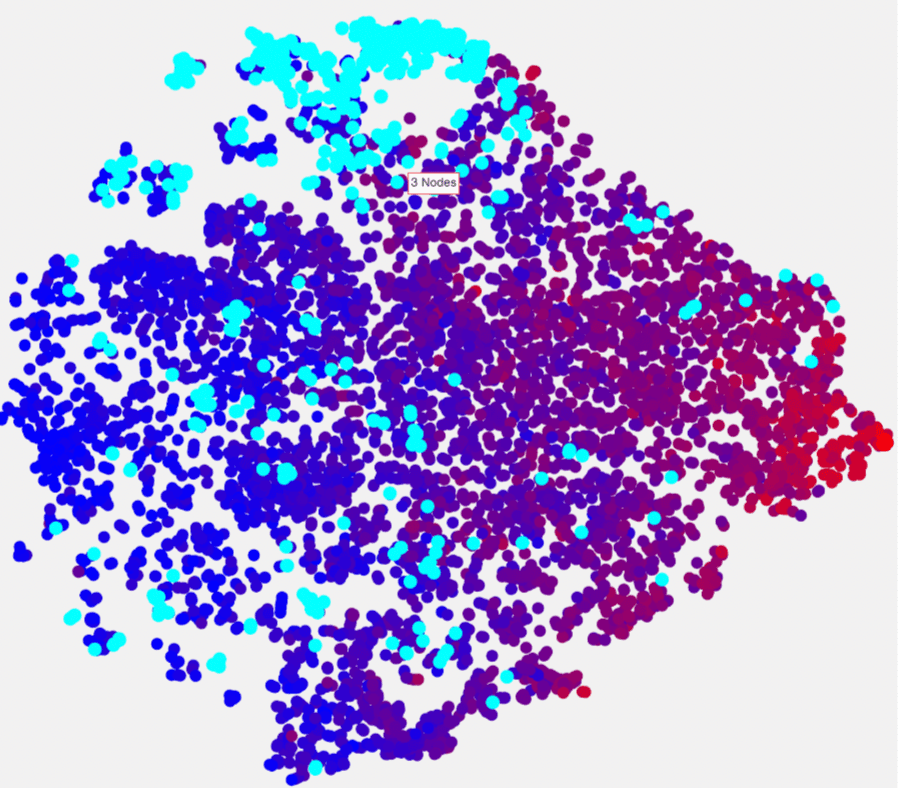
Feature Space Exploration and failure mode identification
Multi-scale: assess scenario-by-scenario, drill down to specific behaviours, or zoom out to see the forest for the trees. Find sources of failure modes in minutes in simulation or real life, guaranteed faster than O(log(Ndimensions))
Comprehensive risk metrics
Dozens of industry-standard metrics (e.g. RSS) and thousands of additional metrics (e.g. at-fault, percent occlusion, total energy), fully programmatically available
Import, explore, and mine your own data
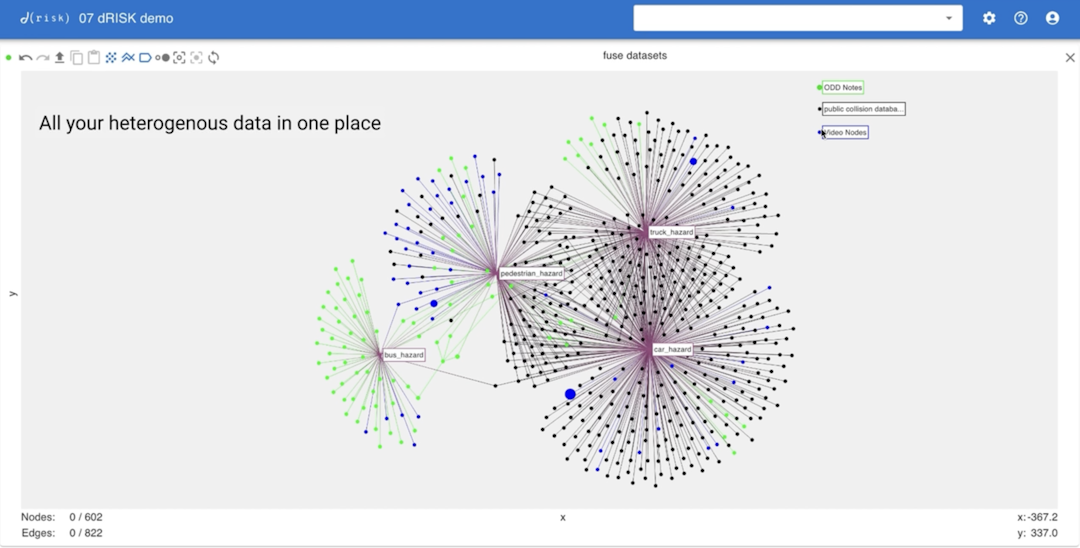
Be it scenario data, real-life recorded data, or a list of ODD feature observations, dRISK Edge enables customers to import and extract insights from vast amounts of heterogeneous data, all in one place
Automatic feedback for nightly regression tests
Automatically fuse regression tests on a periodic or ad-hoc basis into existing data, for weekly/daily/hourly monitoring performance. Periodically update embedding of all scenarios to reveal progress in new tests, export reports flexibly